CUSTOM AUTOMATION FOR TRANSFERRING LEAF SAMPLES FROM A CUSTOM CARTRIDGE TO STANDARD MICROPLATES
THE PROBLEM STATEMENT
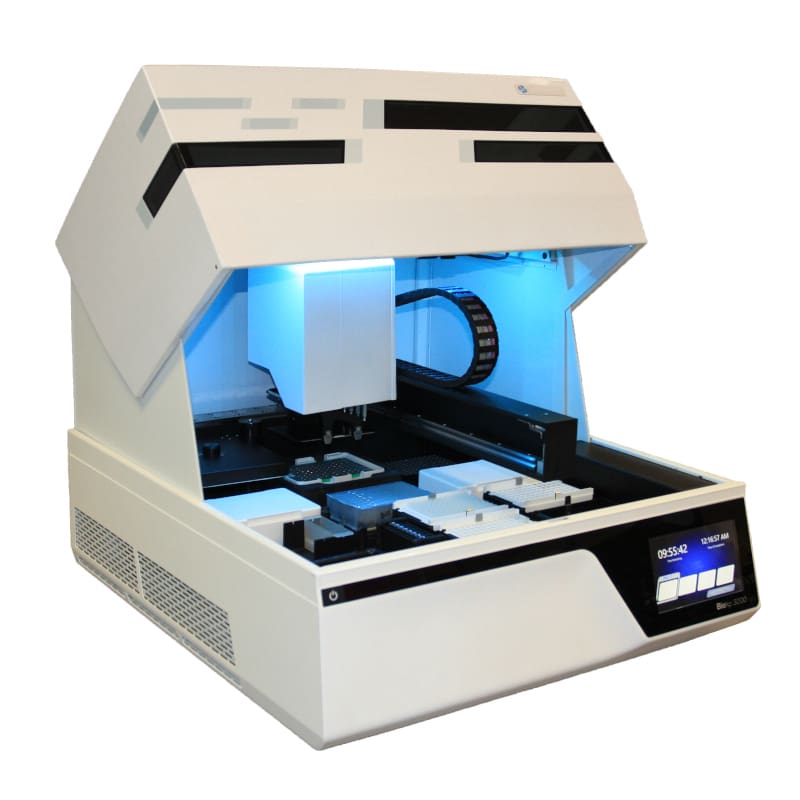
NOVO had already developed an automated sampling system for collecting leaf samples from young plants in the field that significantly sped up the existing process. The sample collection system utilized a cartridge with a custom format to improve usability. It was necessary to transfer the samples from the custom format cartridge to standard 96-well lab plates (microtiter plates). The system, called a reformatting robot, had to minimize footprint on the lab bench and accommodate a minimum of 8 cartridges and 8 microplates per run.
TECHNICAL CHALLENGES: REFORMATTING ROBOT

Each run required approximately 800 individual capsules to be positioned over corresponding wells in the microplates and the contents of the capsules to be cleared by extending a plunger through the capsules. The moves had to be fast and accurate to minimize run time, and the robot platen was relatively large in order to provide deck space for 8 lab plates. A means to overcome the tendency of the leaf material to stick to the punch used to drive it out of the capsules had to be developed. Since the goal was to minimize the footprint of the device, the positioning system had to be compact, as well as rigid and accurate.
In addition to the mechanical design challenges, software to interface with the client’s lab information management system (LIMS) that would maintain the association between the microplate wells and the specific donor plant in the field had to be developed.
THE ENGINEERING BEHIND GREAT PRODUCTS
NOVO engineers designed a cylindrical polar positioning system with a twist—the r-axis motion relied on cam tracks in the rotating platen, thus eliminating the need for eight linear motion axes. This method simplified the system, minimized footprint, and facilitated easy loading and unloading of labware. The custom cartridges were installed onto hinging plates that were open for cartridge loading and unloading, and closed during the reformatting operation. The overall system was extremely compact and efficient, and able to process cartridges at a rate well over eight times that of the single-station Cartesian system that had been used previously. The design of the system was an example of replacing a lab automation approach with an approach more consistent with automated manufacturing equipment.